The laboratory contains a range of didactic equipment, including various teaching aids, tools, and devices that support the learning process and enable better understanding, visualization, and active student participation.
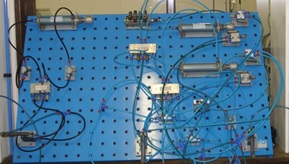
Didactic station for pneumatic control systems
- Basic pneumatic control circuits (speed control of a pneumatic cylinder, monostable and bistable directional valves, direct and indirect control, AND function, OR function, single-cycle and cyclic operation using limit switches).
- Sequential control (two-hand safety activation, locking signals and their elimination, control of pneumatic systems using snap-action limit switches, use of interrupters and time-delay units).
- Cascade method (control of a pneumatic system using the cascade method, locking signals, cascade circuit, rules for drawing diagrams with two, three, and four cascades, development of pneumatic schematics with cascade branches, step-by-step diagrams).
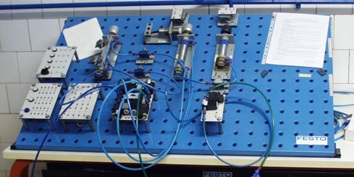
Didactic station for electro-pneumatic control systems
- complex circuits with multiple cylinders
- creation of motion cycles for individual cylinders
- self-holding circuits
- monostable and bistable solenoid valves
- positional control
- relay control
- cyclic operation of electro-pneumatic systems
- system design using function diagrams, step-by-step diagrams, pneumatic control schematics, and electrical control schematics
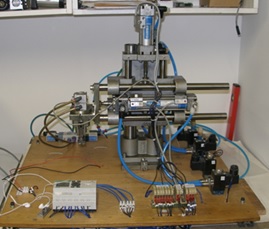
Didactic station for design and simulation of complex electro-pneumatic devices
- PLC control (programming valve control signals, ladder diagram programming, use of position sensors).
- Simulation using Automation Studio and DSHplus tools (verification of device concepts and functionality to achieve the desired cycle).
- Design of a three-axis manipulator (selection of pneumatic components and sensors, determination of cylinder speeds to achieve required cycle timing).
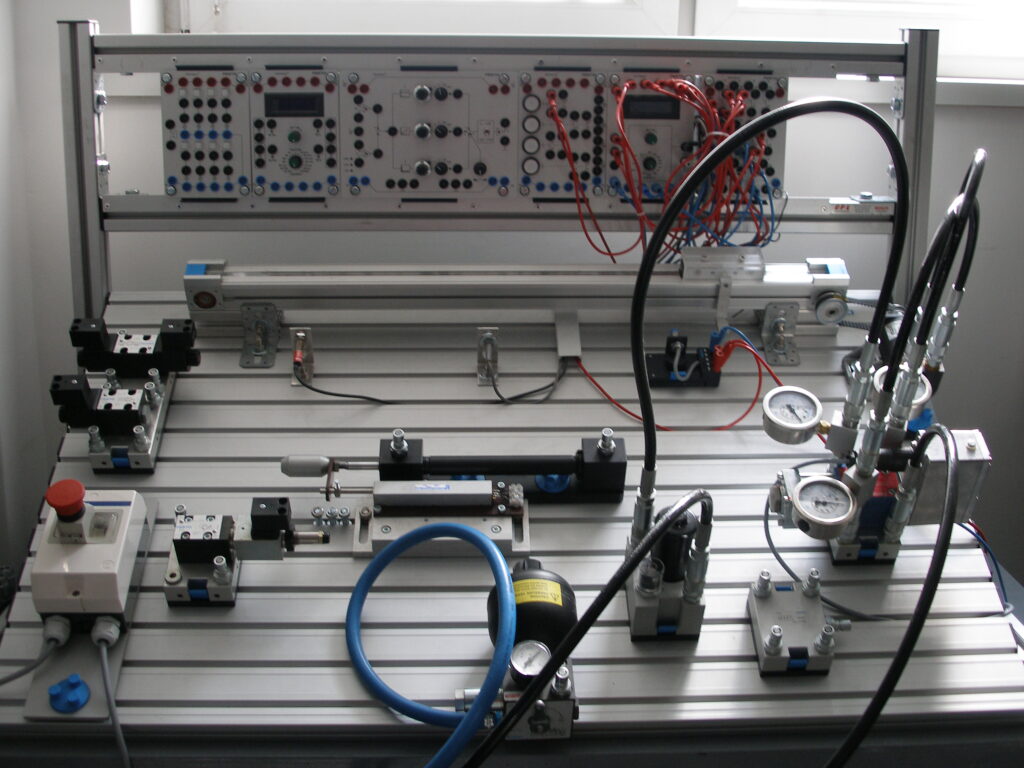
Didactic station for basic electro-hydraulic control systems
- Components of a hydraulic power unit (pumps, safety valves, filters),
- switching techniques and directional control valves (application of basic electro-pneumatic control principles),
- monitoring of hydraulic parameters using display instruments,
- complex circuits with multiple cylinders,
- creation of motion cycles for individual cylinders,
- self-holding circuits,
- monostable and bistable solenoid valves,
- positional control,
- relay control, PLC control,
- cyclic operation of electro-hydraulic systems.
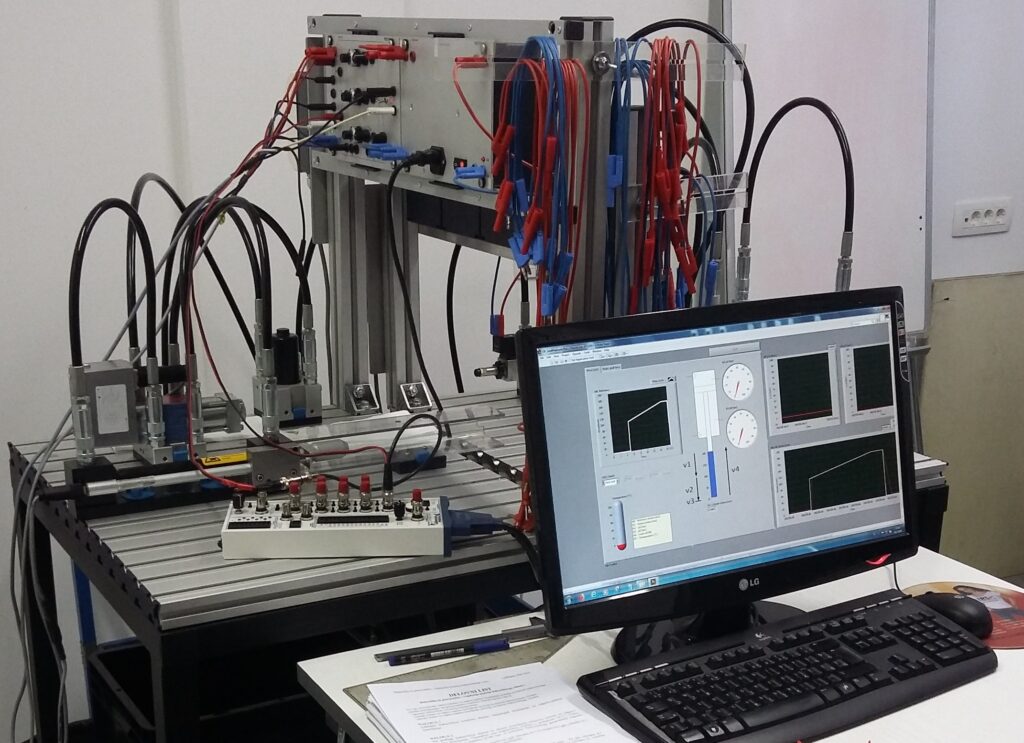
Didactic and experimental station for advanced hydraulic control systems
- Use of proportional technology, proportional valves, and high-dynamic direct-acting servo valves (control valves),
- use of displacement, pressure, force, and temperature sensors,
- signal generation using a function generator,
- control using NI LabVIEW software,
- data acquisition, visualization, monitoring, and storage of measured variables,
- implementation of open-loop control (position, velocity, acceleration, and deceleration control of hydraulic cylinders and rotary motors),
- analysis of the effects of control strategies on hydraulic pressure surges,
- analysis of the influence of operating conditions and control parameters on system stiffness and control quality,
- implementation of closed-loop control (PID control, position, pressure, force control, cycle generation),
- stability analysis and determination of optimal control parameters.
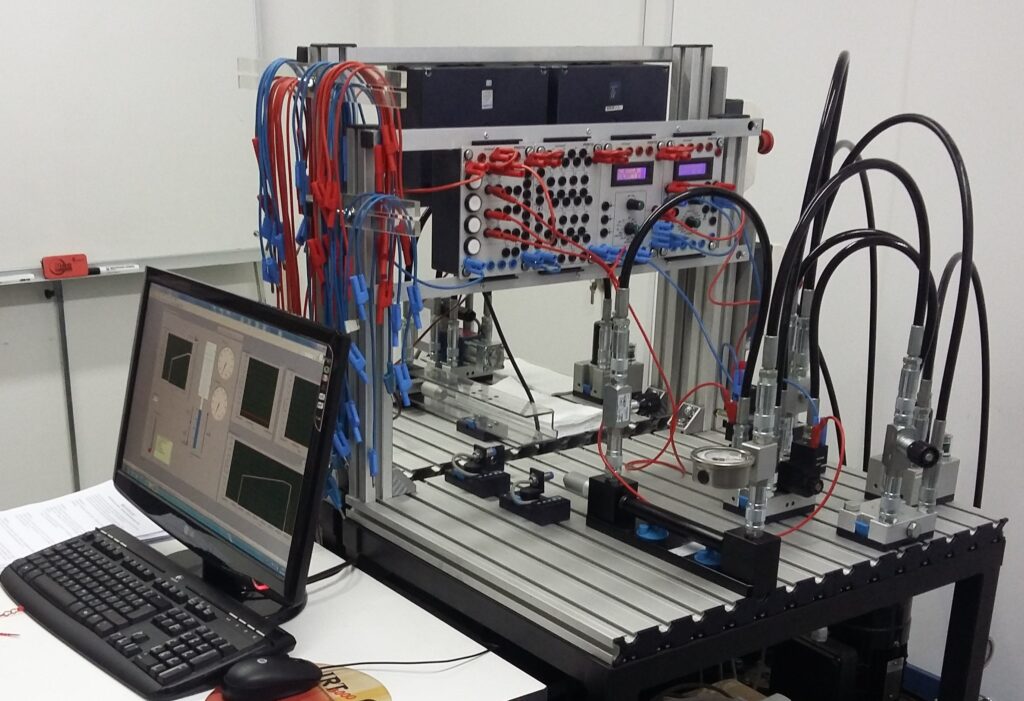
Didactic and experimental hydraulic station for pressure and force control
- Open-loop control of pressure and force,
- use of proportional pressure valves,
- use of function generators or NI LabVIEW,
- cycle generation (pressure, force),
- use of basic sensors (position switches, pressure gauges),
- acquisition, monitoring, storage, and analysis of pressure and piston forces (tensile and compressive forces of hydraulic cylinders),
- development of applications related to pressure and force control.
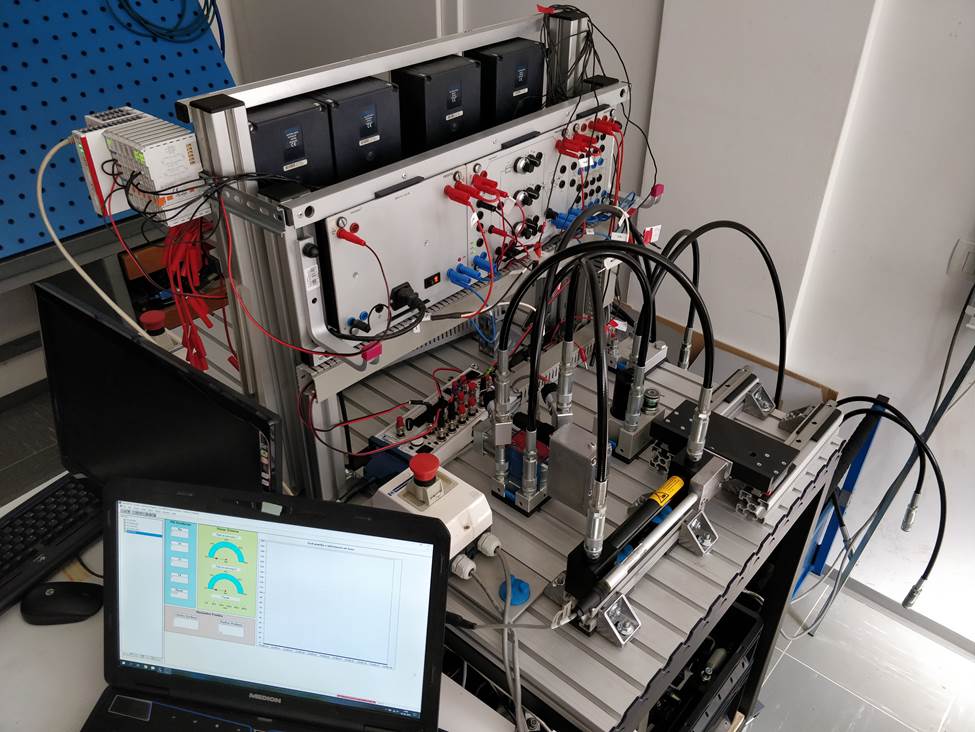
Didactic station for hydraulic control systems – industrial controllers
- Use of proportional technology and high-dynamic direct-acting servo valves (control valves),
- use of displacement, pressure, force, and temperature sensors,
- control using a Beckhoff CX 9020 industrial controller and a graphical interface developed with TwinCAT software,
- data acquisition, visualization, monitoring, and storage of measured variables,
- implementation of closed-loop control (PID control, position control, cycle generation).
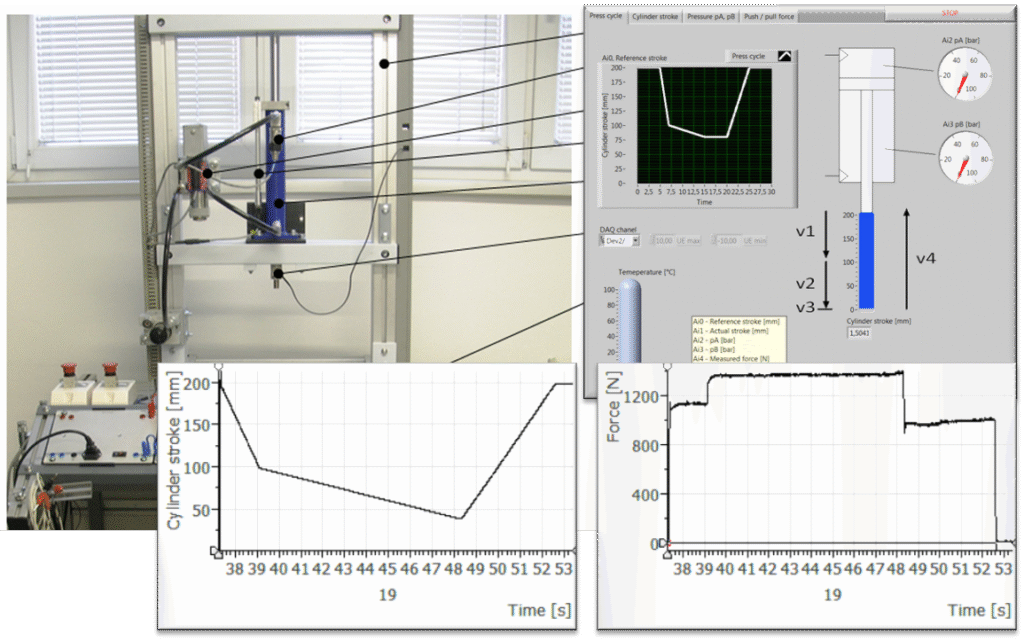
Didactic and experimental hydraulic station – hydraulic mini press
- Use of proportional technology, proportional valves, and high-dynamic direct-acting servo valves (control valves).
- use of displacement, pressure, force, and temperature sensors,
- control using NI LabVIEW software,
- data acquisition, visualization, monitoring, and storage of measured variables,
- implementation of closed-loop control (PID control, position, pressure, force control, cycle generation),
- development of cycles for various applications in hydraulic production systems or testing devices,